3D LiDAR Object Detection for Autonomous Driving: Training a Keypoint Feature Pyramid Network on the KITTI 360 Vision Dataset
By
Pranav Durai
Summary
This research article explores 3D LiDAR object detection for autonomous driving systems, focusing on the implementation and training of a Keypoint Feature Pyramid Network (K-FPN) using the KITTI 360 Vision dataset. The study integrates ADAS (Advanced Driver-Assistance Systems) with LiDAR and RGB camera fusion to improve object detection accuracy in 3D space. The approach leverages point-cloud data from LiDAR sensors combined with camera imagery to enhance environmental perception for self-driving vehicles.
Source
 Twitter / X3D LiDAR Object Detection for Autonomous Driving: Training a Keypoint Feature Pyramid Network on the KITTI 360 Vision Datasetlearnopencv.com
Twitter / X3D LiDAR Object Detection for Autonomous Driving: Training a Keypoint Feature Pyramid Network on the KITTI 360 Vision Datasetlearnopencv.comKey quotes
· 3 pulled3D LiDAR object detection is a process that assists with identifying and localizing objects of interest in a 3-dimensional space.
Among these technologies, 3D LiDAR object detection is a transformative approach, offering unprecedented accuracy and depth in environmental perception.
In this comprehensive research article, we will extensively explore the implementation and training procedure for Keypoint Feature Pyramid Network (or) K-FPN using the KITTI 360 Vision dataset.
You might also wanna read

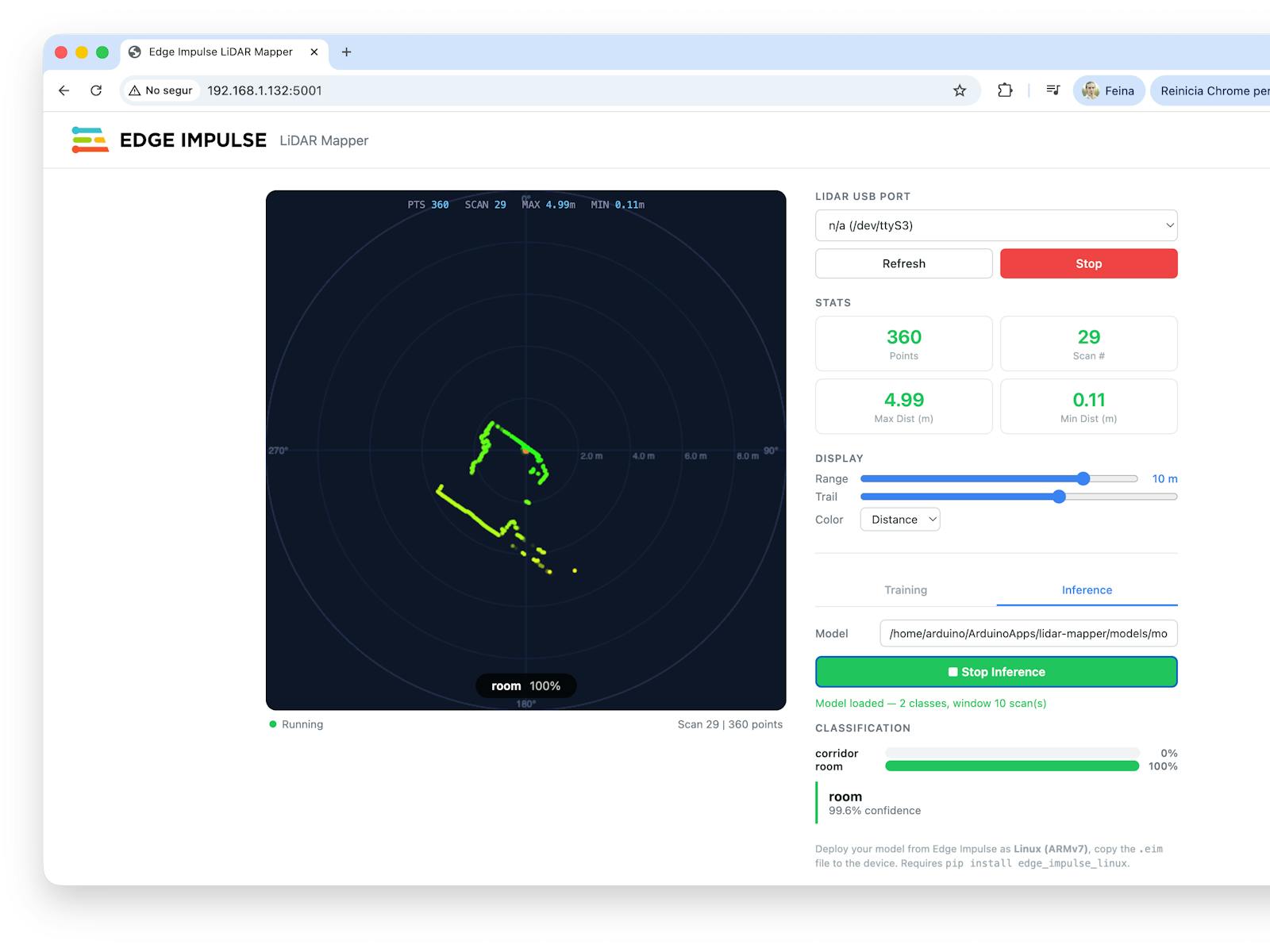
Edge AI Room Detection Using 2D dToF LiDAR and Arduino UNO
This project demonstrates Edge AI for environment classification using a 2D dToF LiDAR sensor connected to an Arduino UNO. Instead of using
 hackster.io·5d ago
hackster.io·5d agoGemini 2.5 Pro: A Comparative Analysis in Object Detection
Gemini 2.5 Pro is a decent object detector, comparable to Yolo V3 on MS-COCO validation dataset. The article discusses the potential of Mult
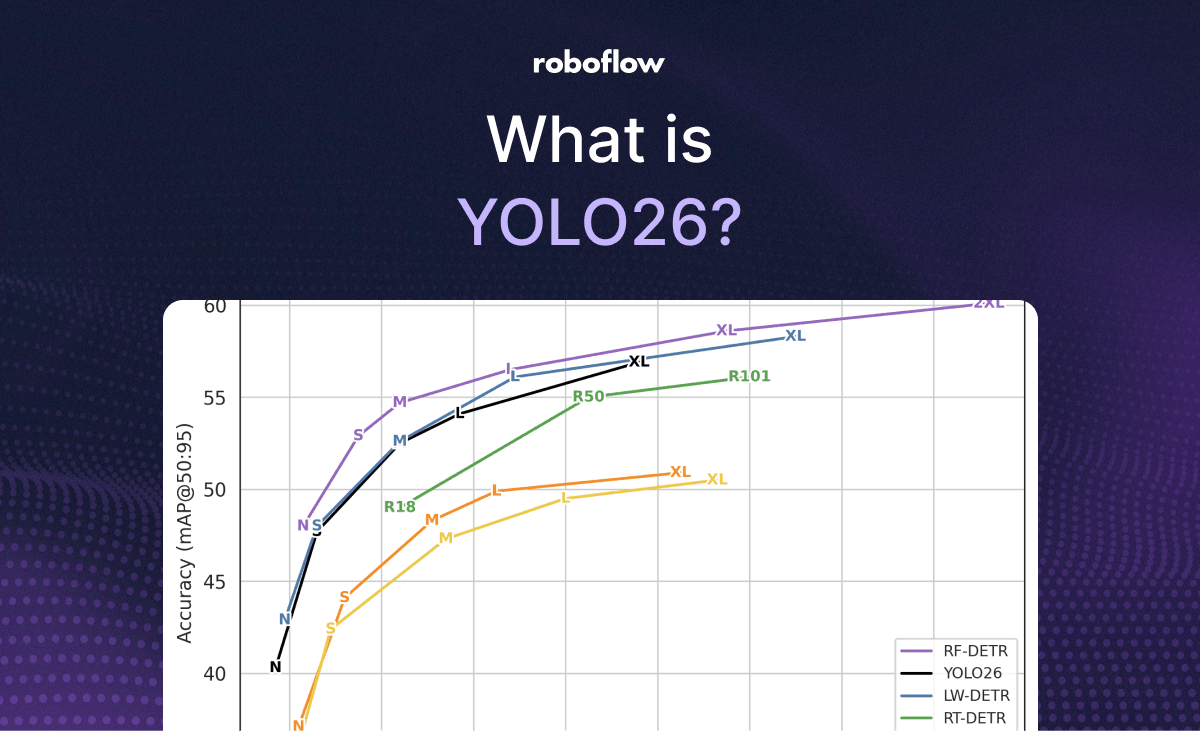
YOLO26: New Real-Time Vision AI Model Family Removes NMS for Lower Latency, Optimizes for Edge Hardware
YOLO26 is a new family of real-time computer vision models released in January 2026, supporting object detection, instance segmentation, pos
 blog.roboflow.com·1d ago
blog.roboflow.com·1d ago
Ultralytics YOLO26: A Unified Real-Time Vision Model Family with NMS-Free Inference and Advanced Training Pipeline
Ultralytics YOLO26 is a new family of real-time vision models that addresses key limitations of prior YOLO detectors. It introduces a dual-h
Deep learning framework detects fine-scale ecological features invisible to standard satellites
The article presents a high-resolution deep learning framework developed to detect fine-scale ecological features like hedgerows and copses
 research.google·2d ago
research.google·2d ago
Flock Safety's AI Surveillance Network: How License Plate Readers Track Vehicles, Pedestrians, and Drone Data Across 12,000 Communities
Flock Safety has deployed AI-powered automated license plate readers (ALPR) across over 12,000 communities in the United States, creating an
 bgr.com·6d ago
bgr.com·6d agoComments
Sign in to join the conversation.
No comments yet. Be the first.