Edge AI Room Detection Using 2D dToF LiDAR and Arduino UNO
By
Marc Pous
Summary
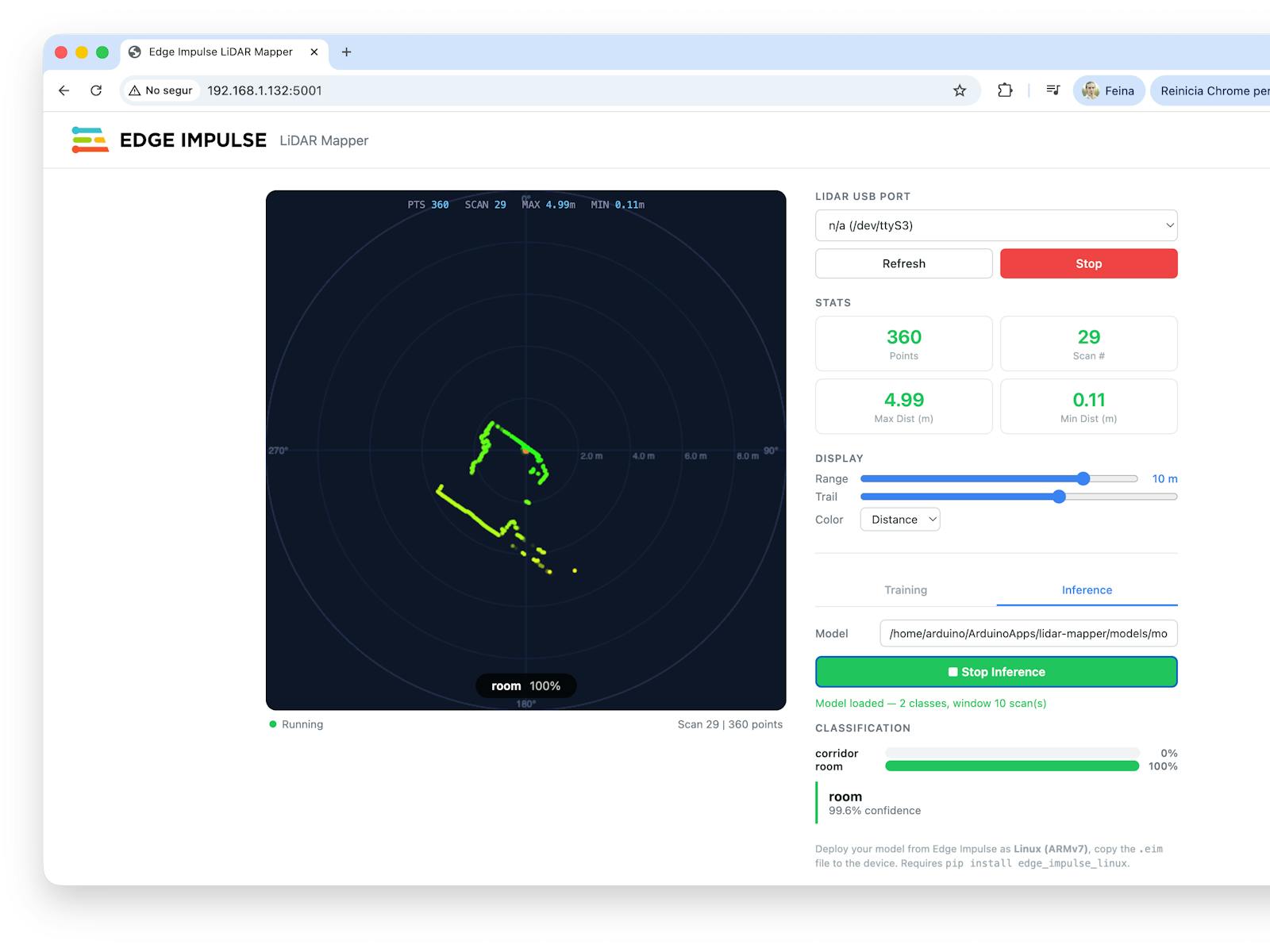
This project demonstrates Edge AI for environment classification using a 2D dToF LiDAR sensor connected to an Arduino UNO. Instead of using traditional SLAM or computer vision, it extracts 360-degree "distance fingerprints" from the environment, treats them as time-series feature vectors, and trains a neural network using Edge Impulse Studio. The trained model is deployed back to the Arduino UNO for real-time room detection at the edge, avoiding cloud dependency.
Source
 bskyEdge AI Room Detection Using 2D dToF LiDAR and Arduino UNOhackster.io
bskyEdge AI Room Detection Using 2D dToF LiDAR and Arduino UNOhackster.ioKey quotes
· 3 pulledThis project demonstrates an implementation of Edge AI for environment classification using a LiDAR without the computational overhead of traditional SLAM or computer vision.
By utilizing a 2D dToF (Direct Time-of-Flight) LiDAR, we extract a 'distance fingerprint' from the surrounding environment.
These 360 degree distance profiles are treated as time-series feature vectors, which are then used to train a neural network with Edge Impulse Studio.
You might also wanna read

3D LiDAR Object Detection for Autonomous Driving: Training a Keypoint Feature Pyramid Network on the KITTI 360 Vision Dataset
This research article explores 3D LiDAR object detection for autonomous driving systems, focusing on the implementation and training of a Ke
 learnopencv.com·10h ago
learnopencv.com·10h ago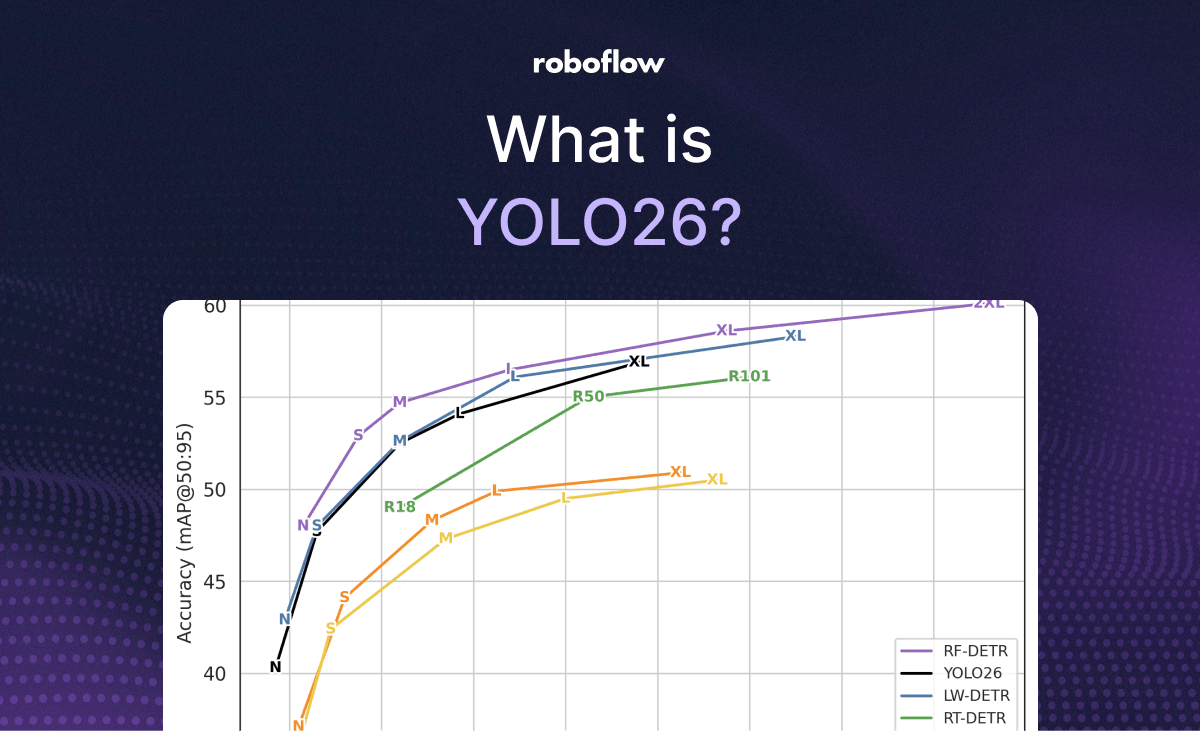
YOLO26: New Real-Time Vision AI Model Family Removes NMS for Lower Latency, Optimizes for Edge Hardware
YOLO26 is a new family of real-time computer vision models released in January 2026, supporting object detection, instance segmentation, pos
 blog.roboflow.com·1d ago
blog.roboflow.com·1d ago
Using CUE Schemas to Unify IoT Sensor Data in Home Automation
The article details the author's experience building a home automation system using CUE (Configure, Unify, Execute) schemas to handle divers
 aran.dev·8mo ago
aran.dev·8mo ago
FusionCore: An Open-Source ROS 2 Sensor Fusion SDK for Mobile Robot Localization
FusionCore is an open-source ROS 2 sensor fusion SDK that combines IMU, wheel encoders, and GPS into a reliable position estimate for mobile
 github.com·2mo ago
github.com·2mo ago
All-Optical Chip Enables Large-Scale AI Semantic Vision Generation
Researchers have developed an all-optical synthesis chip that addresses the computing power shortage in large-scale generative AI models. Th
 science.org·5mo ago
science.org·5mo ago
Google Launches AI Edge Gallery for On-Device Generative AI Testing
Google has launched AI Edge Gallery, an experimental Android app that allows users to run generative AI models locally on their devices with
 Product Hunt·9mo ago
Product Hunt·9mo agoComments
Sign in to join the conversation.
No comments yet. Be the first.