FusionCore: An Open-Source ROS 2 Sensor Fusion SDK for Mobile Robot Localization
By
kharwarm
Toasted golden, schmeared with insight. Top of the rack.
Summary
FusionCore is an open-source ROS 2 sensor fusion SDK that combines IMU, wheel encoders, and GPS into a reliable position estimate for mobile robots. It addresses the limitations of the standard robot_localization package by offering native ECEF GPS fusion, IMU bias estimation, and self-tuning noise covariance with zero manual tuning required. Licensed under Apache 2.0, it provides a UKF-based 3D native solution for improved localization accuracy.
Key quotes
· 3 pulledEvery mobile robot needs to know where it is.
IMUs drift. Wheels slip. GPS jumps. You need software that intelligently combines all three into one trustworthy position estimate.
The standard one for ROS, robot_localization, lacks native ECEF GPS fusion, IMU bias estimation.
You might also wanna read

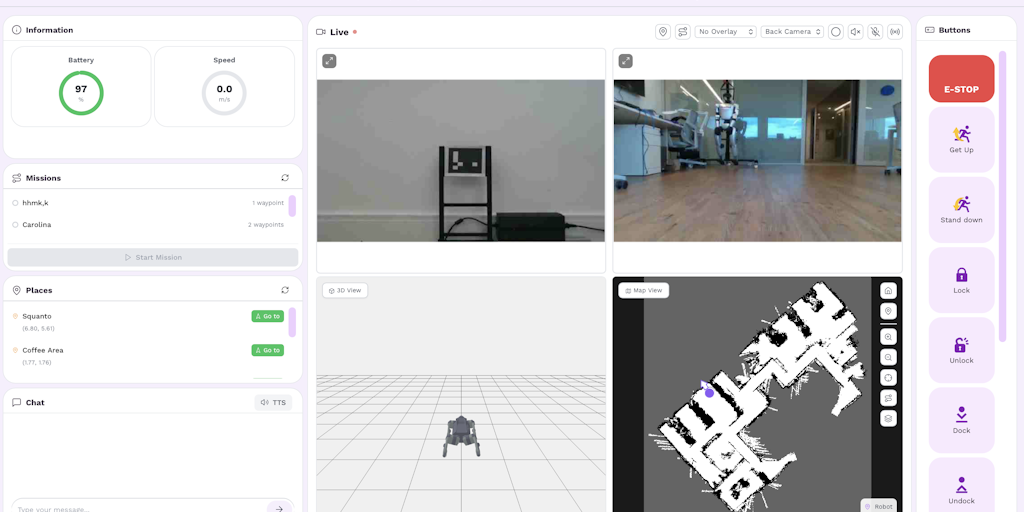
BotBrain: Open-Source Modular Platform for ROS2 Robot Control and Autonomous Missions
BotBrain is an open-source modular platform combining software and hardware for controlling, mapping, and running autonomous missions on leg
 Product Hunt·3mo ago
Product Hunt·3mo ago
Netflix engineer's open-source tool cuts AI token usage by up to 90%
Netflix senior engineer Tejas Chopra created software called "Project Headroom" that prunes redundant tokens from AI agent instructions befo
 theregister.com·4h ago
theregister.com·4h ago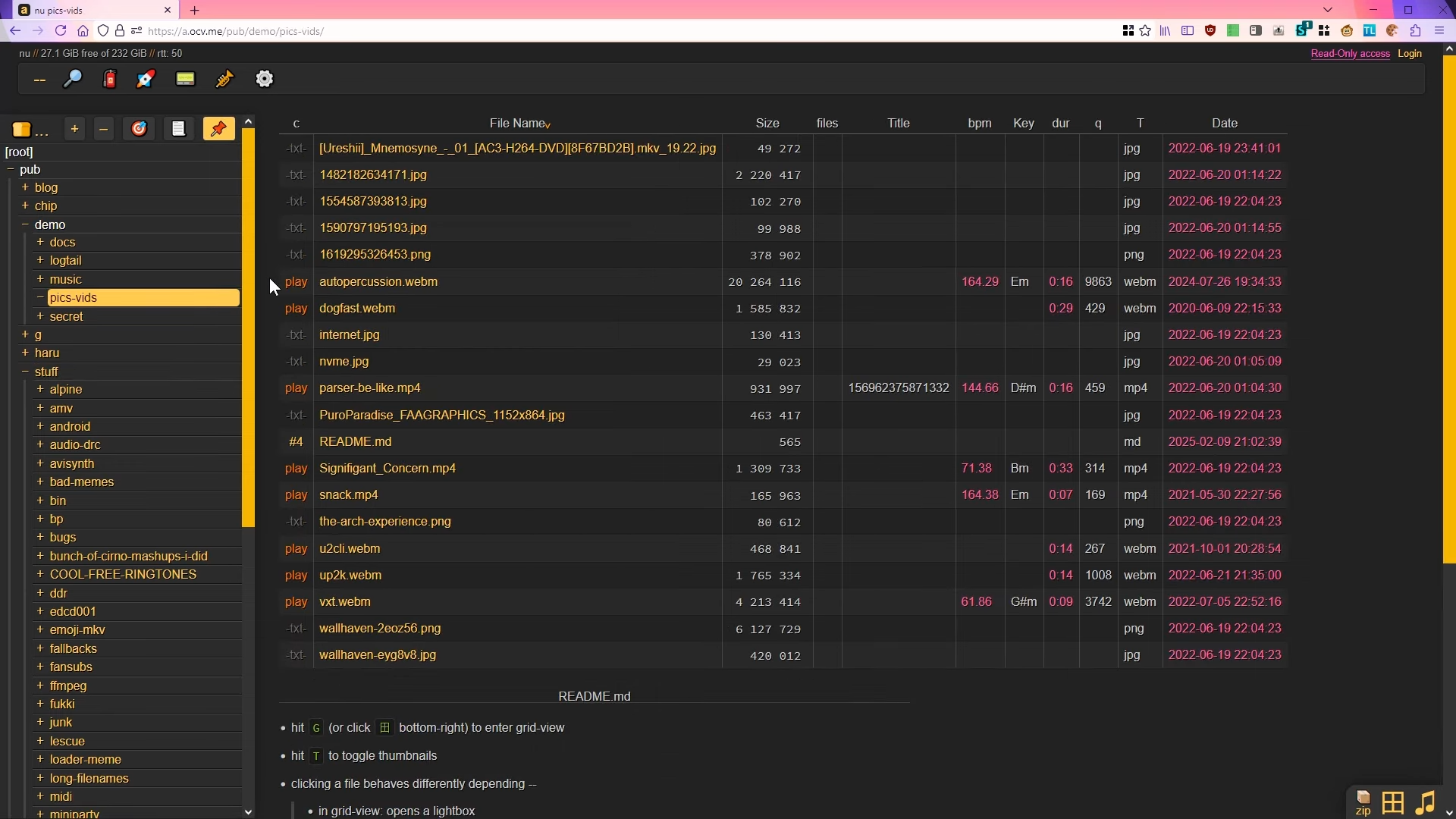
Copyparty: A Lightweight File Server That Runs as a Single Python Script
Copyparty is a lightweight, full-featured file server that runs as a single Python script, making it extremely easy to set up without needin
 hackaday.com·6h ago
hackaday.com·6h ago
Researcher's "ADHD" tool for Claude Code claims 2x improvement; experts call for more evidence
Solo researcher Udit Akhouri released a third-party Agent SDK tool called "ADHD" for Claude Code on Reddit, claiming it makes the coding age
 bit.ly·1d ago
bit.ly·1d ago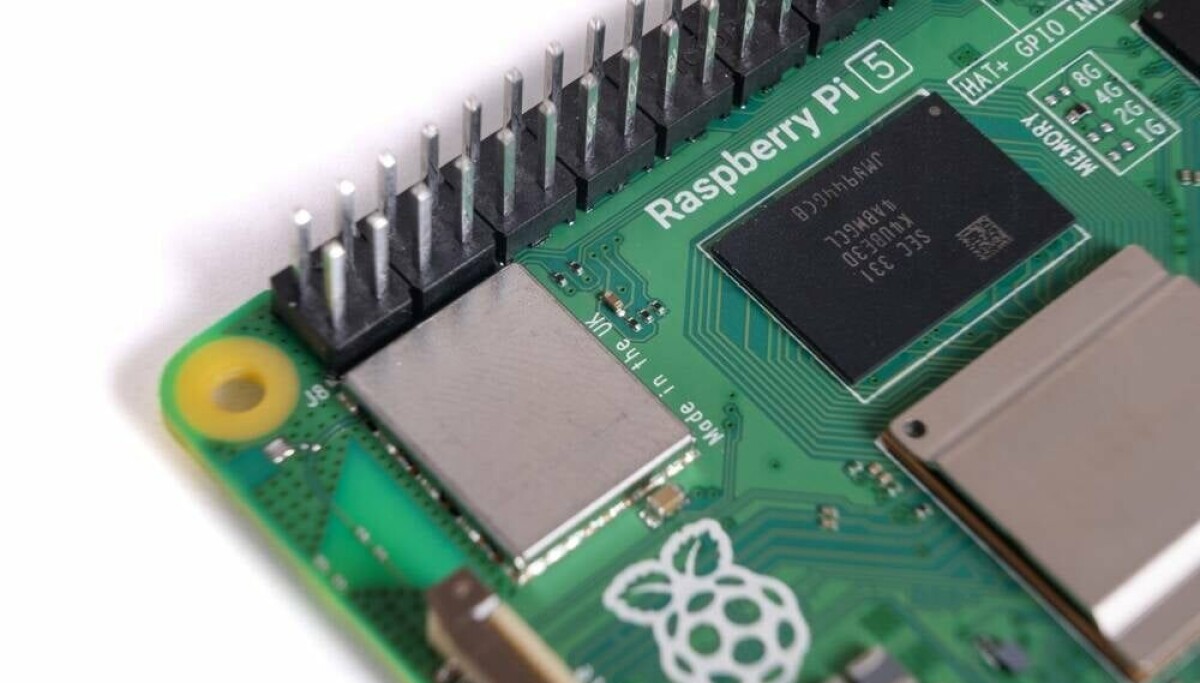
ReactOS open-source Windows NT clone reaches ARM64 boot milestone on Raspberry Pi 5
ReactOS, the open-source project aiming to recreate Windows NT, has achieved a new milestone by booting on ARM64 architecture. The experimen
theregister.com·1d ago
Zig Devlog: Build System Rework Separates Maker and Configurer Processes
This devlog entry from the Zig programming language project announces a major rework of the build system, separating the maker process from
ziglang.org·1d ago