Using Vision-Language Models to Segment Robot Demonstration Videos into Subtask Annotations
By
Macrodata Labs
Summary
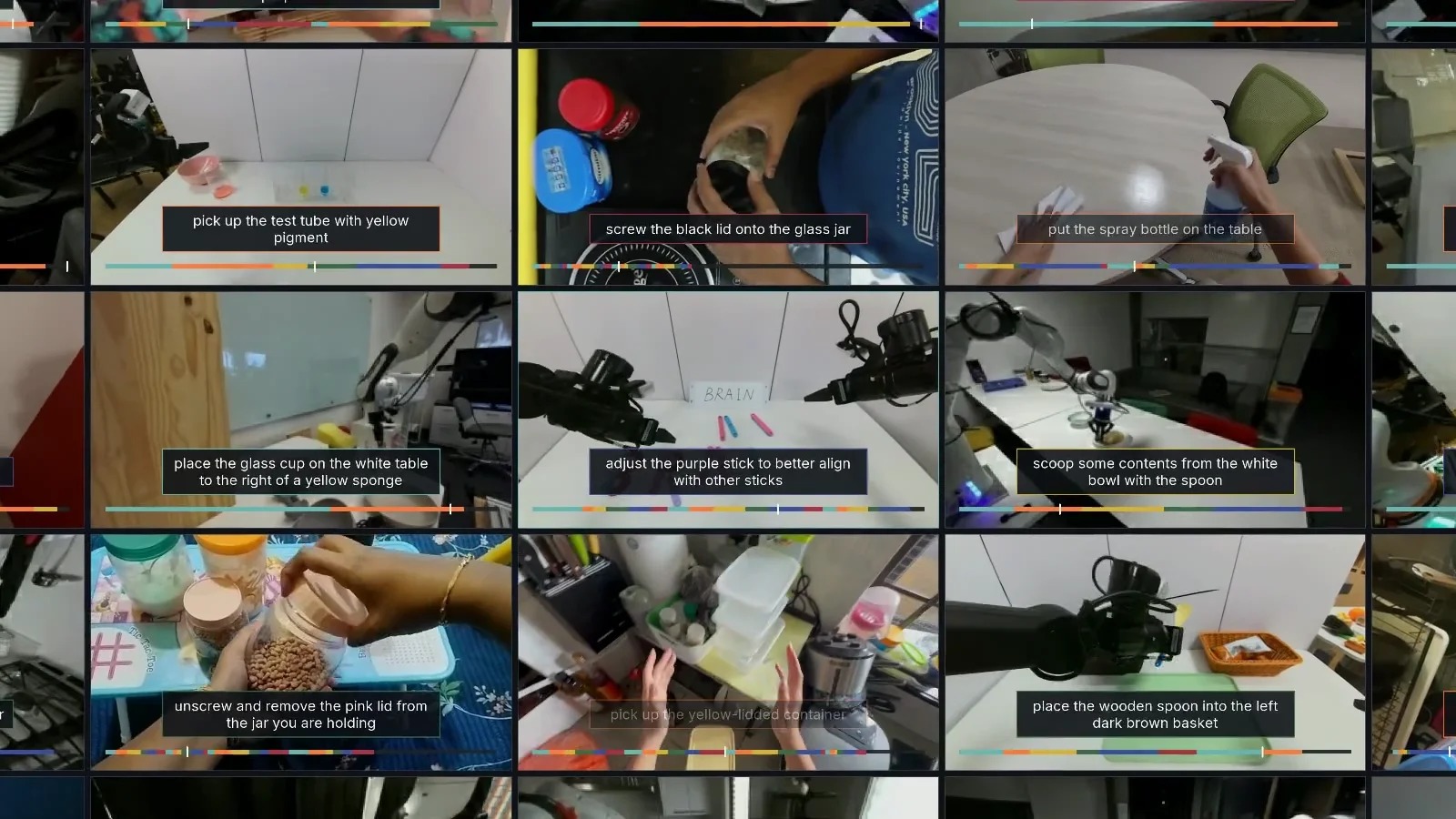
This article presents a benchmark and field report on using Vision-Language Models (VLMs) to segment robot demonstration videos and egocentric video into timestamped subtask annotations. It addresses the challenge of teaching robots long-horizon tasks by breaking down complex demonstrations into actionable steps, using the analogy of learning to cook a new recipe. The work focuses on improving robot learning from video by providing more granular, structured annotations beyond high-level instructions.
Source
 Hacker NewsUsing Vision-Language Models to Segment Robot Demonstration Videos into Subtask Annotationsmacrodata.co
Hacker NewsUsing Vision-Language Models to Segment Robot Demonstration Videos into Subtask Annotationsmacrodata.coKey quotes
· 3 pulledImagine walking into a kitchen you have never seen before with an instruction: 'Make me goulash.' If you have never cooked it, you will need to learn it.
To teach robots new long-horizon tasks, we need more than weak high-level instructions.
For a robotics demonstration video, the useful signal is which...
You might also wanna read


BabyVision Benchmark Reveals MLLMs Fail at Basic Visual Tasks That 3-Year-Olds Can Solve
This paper introduces BabyVision, a benchmark designed to assess core visual reasoning abilities in Multimodal LLMs (MLLMs) independent of l
Action Images: End-to-End Robotic Policy Learning via Multiview Video Generation
Action Images is an end-to-end framework for robotic policy learning that uses multi-view images and text instructions to jointly generate R
 github.com·9d ago
github.com·9d ago
DILLO: A Language-Based World Model for Proactive Agent Steering Without Visual Simulation
This paper introduces DILLO (DIstiLLed Language-ActiOn World Model), a proactive agent steering framework that replaces slow visual simulati

JAMEL: A Framework for Joint Memory and Exploration Learning in Language Model Agents
This paper introduces JAMEL (Joint Agent Memory and Exploration Learning), a framework that trains language model agents to explore open-end

ReMoT: A Reinforcement Learning Framework Using Motion Contrast Triplets to Improve VLM Spatio-Temporal Reasoning
ReMoT (Reinforcement Learning with Motion Contrast Triplets) is a unified training paradigm designed to address spatio-temporal consistency

Sensorimotor World Model: Learning Action-Aligned Representations via Inverse Dynamics Regularization
This paper introduces a Sensorimotor World Model (SMWM), a latent world model trained end-to-end with inverse dynamics regularization. The a
Comments
Sign in to join the conversation.
No comments yet. Be the first.