FTP-1: A Generalist Foundation Model for Tactile Robotic Manipulation Across Diverse Sensors
By
Chengbo Yuan*‡123
Summary
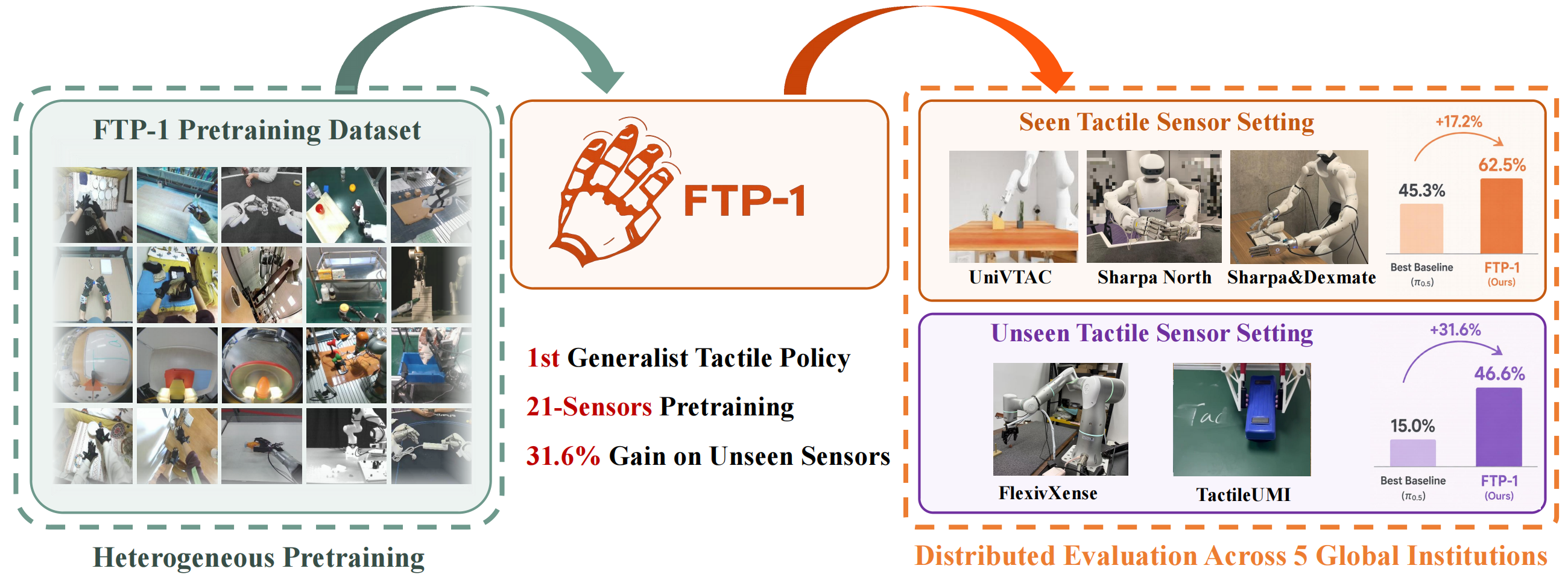
FTP-1 is introduced as the first generalist foundation tactile policy pretrained for diverse tactile sensors and robotic embodiments. It leverages a large-scale heterogeneous tactile manipulation dataset to transfer contact-rich manipulation skills across different hardware platforms. The model has been tested across leading institutions worldwide including UC Berkeley, Tsinghua University, ETH Zurich, and others, demonstrating a +31.6% improvement in downstream performance on unseen sensor setups.
Source
 Twitter / XFTP-1: A Generalist Foundation Model for Tactile Robotic Manipulation Across Diverse Sensorsftp1-policy.github.io
Twitter / XFTP-1: A Generalist Foundation Model for Tactile Robotic Manipulation Across Diverse Sensorsftp1-policy.github.ioKey quotes
· 3 pulledFTP-1 is the first generalist foundation tactile policy pretrained for diverse sensors and embodiments.
Pretrained on a large-scale heterogeneous tactile manipulation dataset, FTP-1 improves downstream performance with +31.6% gain on unseen sensor setups.
FTP-1 has been tested across leading institutions worldwide, including Sharpa, UC Berkeley, Tsinghua University, ETH Zurich, SJTU and beyond—demonstrating strong performance across a wide range of robotic platforms and tactile sensors.
You might also wanna read


General Physics Transformer Achieves Foundation Model Capabilities for Multiple Physical Systems
Researchers present the General Physics Transformer (GPhyT), a physics foundation model trained on 1.8 TB of diverse simulation data that ca

Survey of Self-Evolving AI Agents: Bridging Foundation Models and Lifelong Adaptability
The article surveys the emerging field of self-evolving AI agents, which aim to bridge the static capabilities of foundation models with the
Multistable thin-shell metastructures for multiresponsive metabots

Butter-Bench Evaluation: Testing LLM-Controlled Robots for Practical Household Tasks
Researchers at Andon Labs created Butter-Bench, an evaluation framework to test whether current large language models (LLMs) can effectively
 andonlabs.com·8mo ago
andonlabs.com·8mo ago
Using Curriculum Learning and PufferLib to Train Superhuman AI Agents for 2048 and Tetris
The article describes using PufferLib, a reinforcement learning framework, to train gaming agents that achieve superhuman performance in 204

Foundation Models for Wearable Behavioral Data Improve Health Predictions
Researchers developed foundation models for behavioral data from wearable devices using over 2.5 billion hours of data from 162,000 individu
Comments
Sign in to join the conversation.
No comments yet. Be the first.