OLO Robotics launches browser-based robot programming platform with no setup required
By
Simon I'Anson
A reheated bagel, served cold.
Summary
OLO Robotics is a web-based platform that eliminates the complex setup typically required for robot programming (Linux, ROS2 configuration, dependency management). It allows developers, researchers, and academics to control robots directly from a browser with teleoperation, ROS2 topic access, AI-assisted coding, and JavaScript/Python SDKs — no plugins or local installs needed. The platform aims to reduce the time from idea to working robot from two weeks to 30 minutes.
Key quotes
· 4 pulledWe built OLO because we feel that the status quo is holding back robotics. Linux setup, ROS2 configuration, dependency hell… Precious development and testing time lost.
We wanted to create tools that allowed anyone, including seasoned roboticists, to go from idea to working robot quicker.
With OLO you open a browser, pick your sim environment and robot and start controlling.
Go from idea to working robot in 30 minutes, not two weeks. No Linux installs. No config rabbit holes.
You might also wanna read

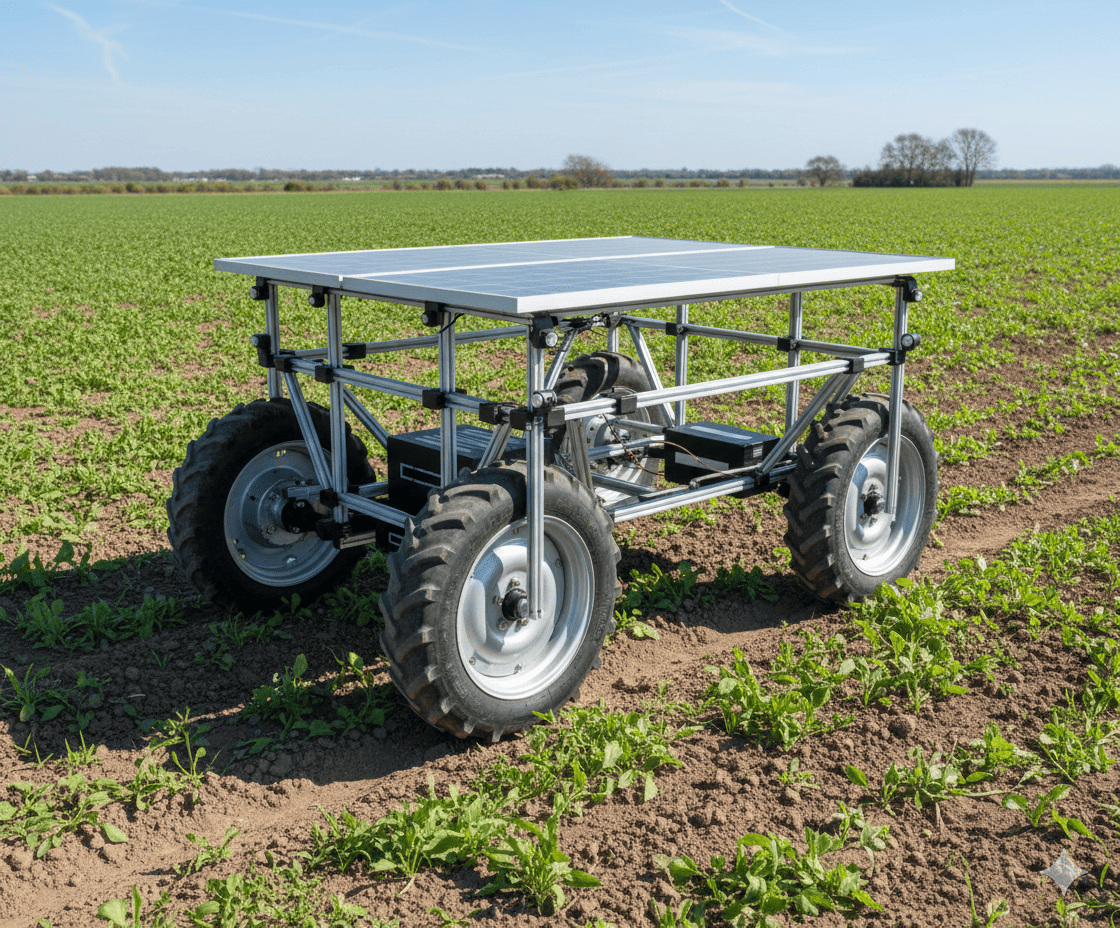
Sowbot Open AgBot: Open-Source Agricultural Robotics Platform for Sustainable Farming
The article presents the Sowbot Open AgBot ecosystem, an open-source agricultural robotics platform designed to bridge the gap between susta
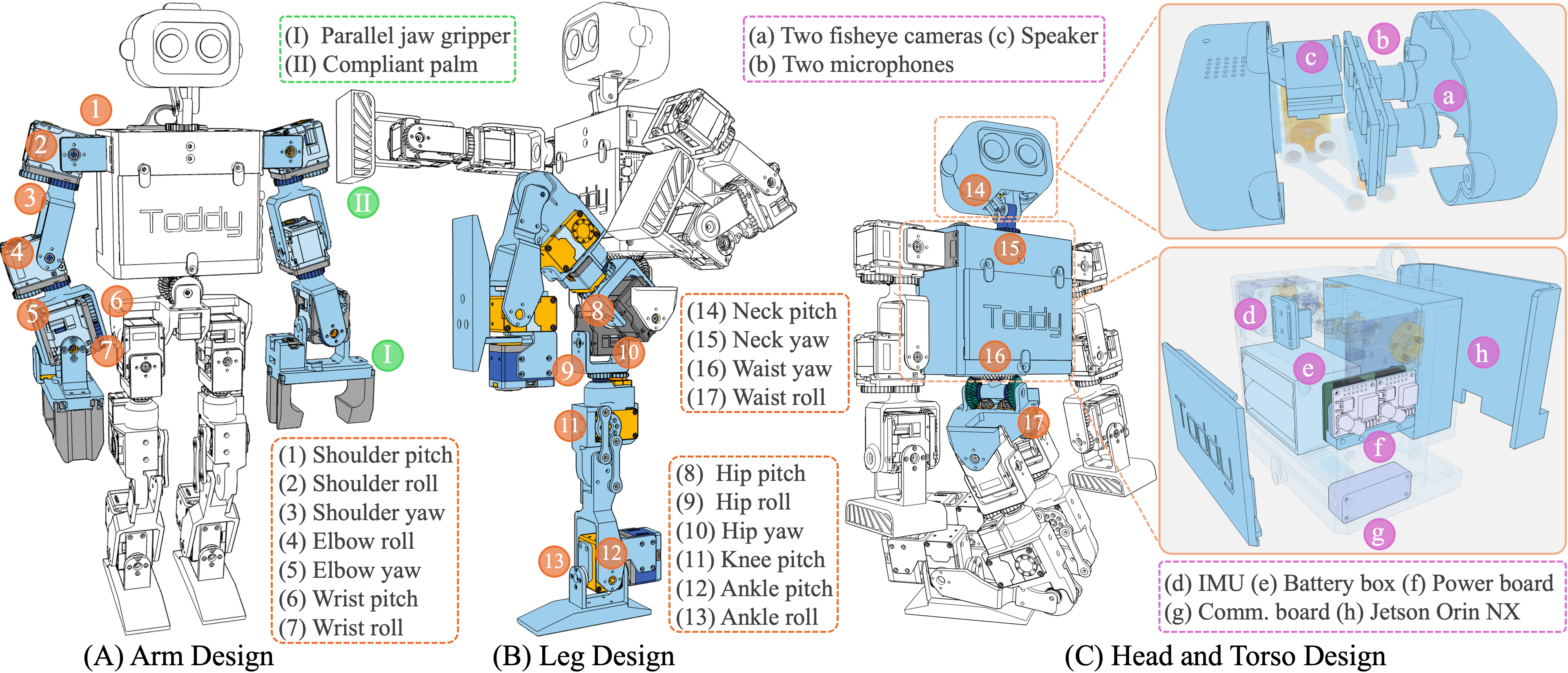
ToddlerBot: Open-Source Humanoid Robot Platform for Machine Learning Research in Loco-Manipulation
ToddlerBot is an open-source humanoid robot platform designed for machine learning research in loco-manipulation. It features 30 active degr
Servo: Open-Source Rust-Based Browser Engine for Embedded Web Technologies
Servo is an open-source web browser engine prototype written in Rust, designed as a lightweight, high-performance alternative for embedding
 github.com·7mo ago
github.com·7mo ago
Simplest Yocto Setup: Minimal Working Example for Embedded Linux Development
The article presents 'simplest-yocto-setup' - a GitHub repository that provides a minimal, realistic working example of a Yocto/OpenEmbedded
github.com·4mo ago
FusionCore: An Open-Source ROS 2 Sensor Fusion SDK for Mobile Robot Localization
FusionCore is an open-source ROS 2 sensor fusion SDK that combines IMU, wheel encoders, and GPS into a reliable position estimate for mobile
github.com·1mo ago
BrowserOS: Open-Source Chromium Browser with Native AI Agent Support
BrowserOS is an open-source Chromium-based browser that runs AI agents natively, positioning itself as a privacy-first alternative to commer
github.com·4mo ago