ToddlerBot: Open-Source Humanoid Robot Platform for Machine Learning Research in Loco-Manipulation
By
base698
Lightly toasted, lightly seasoned, mostly correct.
Summary
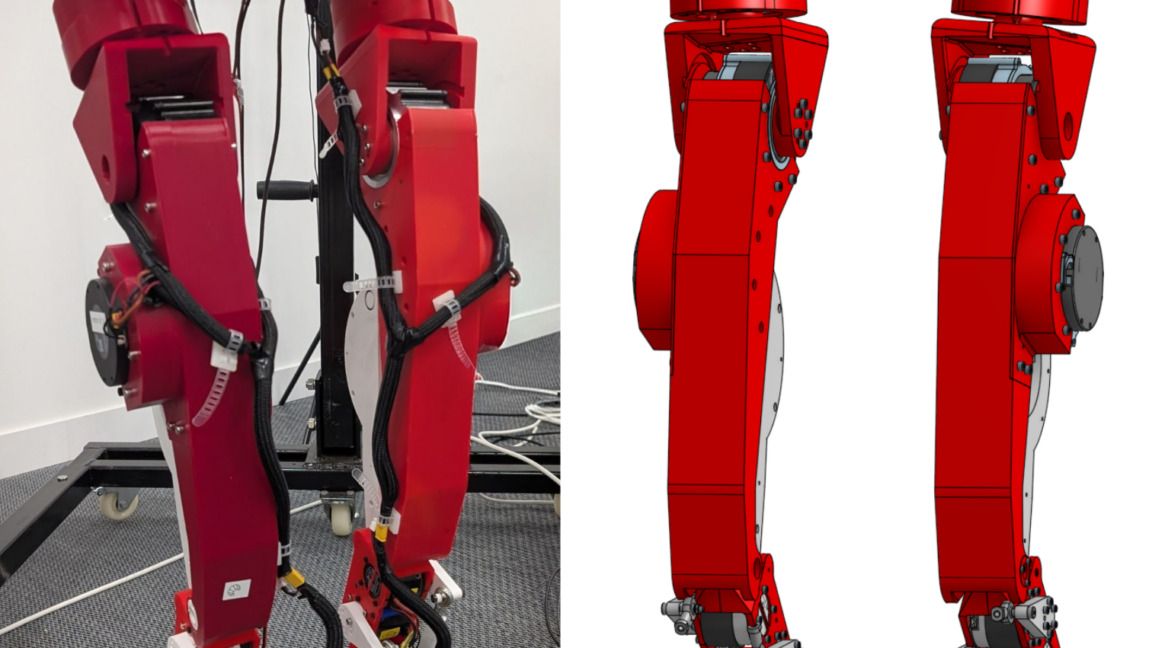
ToddlerBot is an open-source humanoid robot platform designed for machine learning research in loco-manipulation. It features 30 active degrees of freedom (7 per arm, 6 per leg, 2-DoF neck, and 2-DoF waist) with two end-effector designs (compliant palm and parallel-jaw gripper). The platform includes comprehensive sensor systems with fisheye cameras, microphones, speaker, IMU, and is powered by a Jetson Orin NX computer, making it specifically designed for ML compatibility and research applications.
Key quotes
· 4 pulledWe present ToddleBot's mechatronic design in the figure below
We highlight ToddlerBot's 30 active DoFs with orange markers: 7 DoFs per arm, 6 DoFs per leg, a 2-DoF neck, and a 2-DoF waist
Green markers indicate two end-effector designs—a compliant palm and a parallel-jaw gripper
Purple markers denote the sensor and electronics layout with exploded views, featuring two fisheye cameras, a speaker, two microphones, an IMU, and a Jetson Orin NX computer
You might also wanna read

Hugging Face launches $2,500 open-source 3D-printable humanoid robot legs for AI research
Hugging Face has released the LeRobot Humanoid project, a $2,500 pair of humanoid robot legs built from 3D-printable parts and off-the-shelf
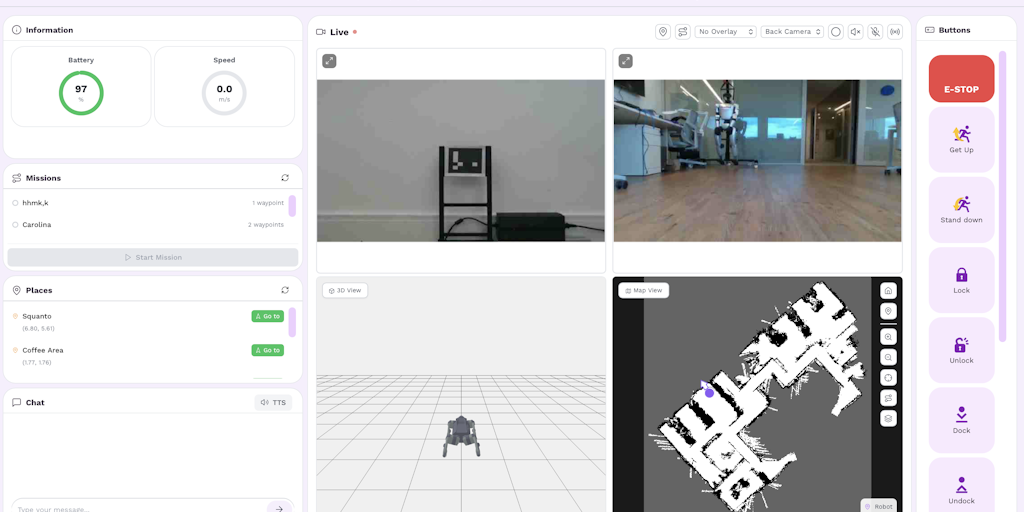
BotBrain: Open-Source Modular Platform for ROS2 Robot Control and Autonomous Missions
BotBrain is an open-source modular platform combining software and hardware for controlling, mapping, and running autonomous missions on leg
 Product Hunt·3mo ago
Product Hunt·3mo ago