Research: Learning Athletic Humanoid Tennis Skills from Imperfect Human Motion Data
LATENT
Read the full articleYou might also wanna read

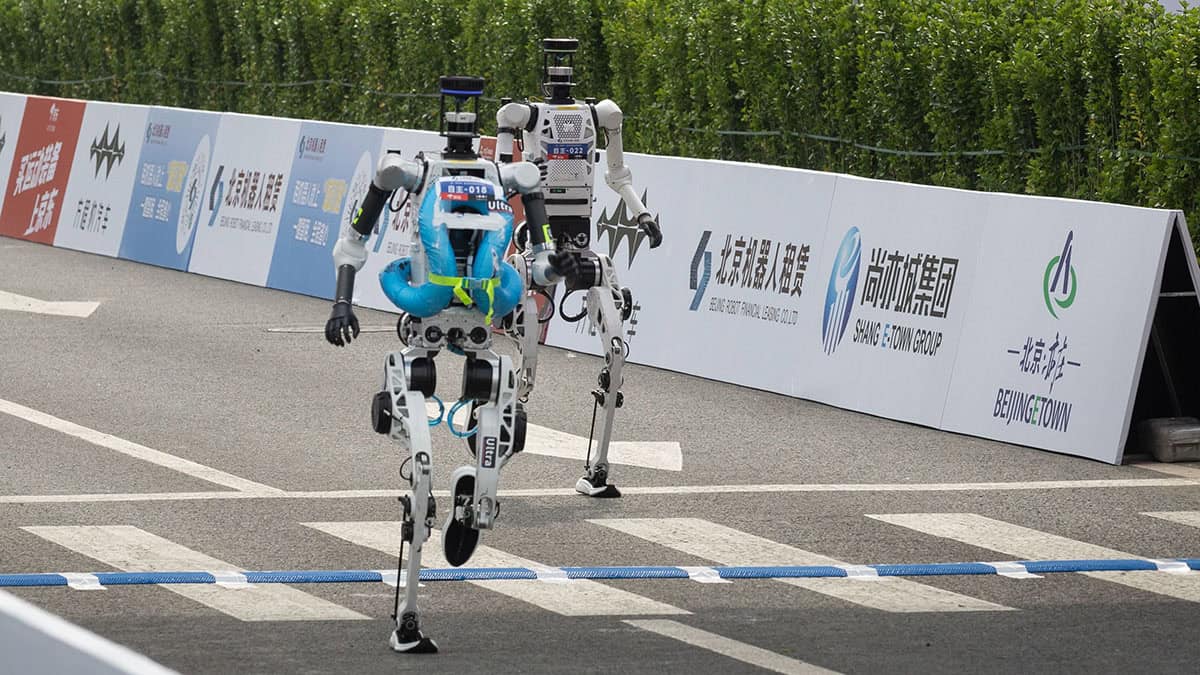
How AI is making humanoid robots more lifelike: A look at the Beijing Half Marathon and beyond
Honor Powrie considers whether AI can make robots more human
physicsworld.com·1mo ago

Beijing half-marathon shows rapid improvement in humanoid robot athleticism and navigation
The race's inaugural edition last year was riddled with mishaps, and most robots were unable to finish.
Rewiring sport: How technology is helping athletes break barriers
Supershoes, robot sparring partners and AI could be the difference between winning and losing
ft.com·7d ago
Rewiring sport: How technology is helping athletes break barriers
Supershoes, robot sparring partners and AI could be the difference between winning and losing
ft.com·7d ago

Universidad Señor de Sipán incorpora 4 robots humanoides y marca un hito en la educación superior peruana
La Universidad Señor de Sipán presentó cuatro robots humanoides de última generación que serán utilizados para la enseñanza, la investigació
RPP NOTICIAS·7d ago
Machine Learning-Guided Training for Elite Athletes (MLGT)
Conditions : Athletic Injuries Interventions : Behavioral: Adaptive Machine Learning Workload Optimization Sponsors : Debre Berhan Universit
clinicaltrials.gov·12d ago
Comments
Sign in to join the conversation.
No comments yet. Be the first.