The Gearbox Problem: How Mechanical Design Limits Robot Dexterity
By
shmublu
Toasted golden, schmeared with insight. Top of the rack.
Summary
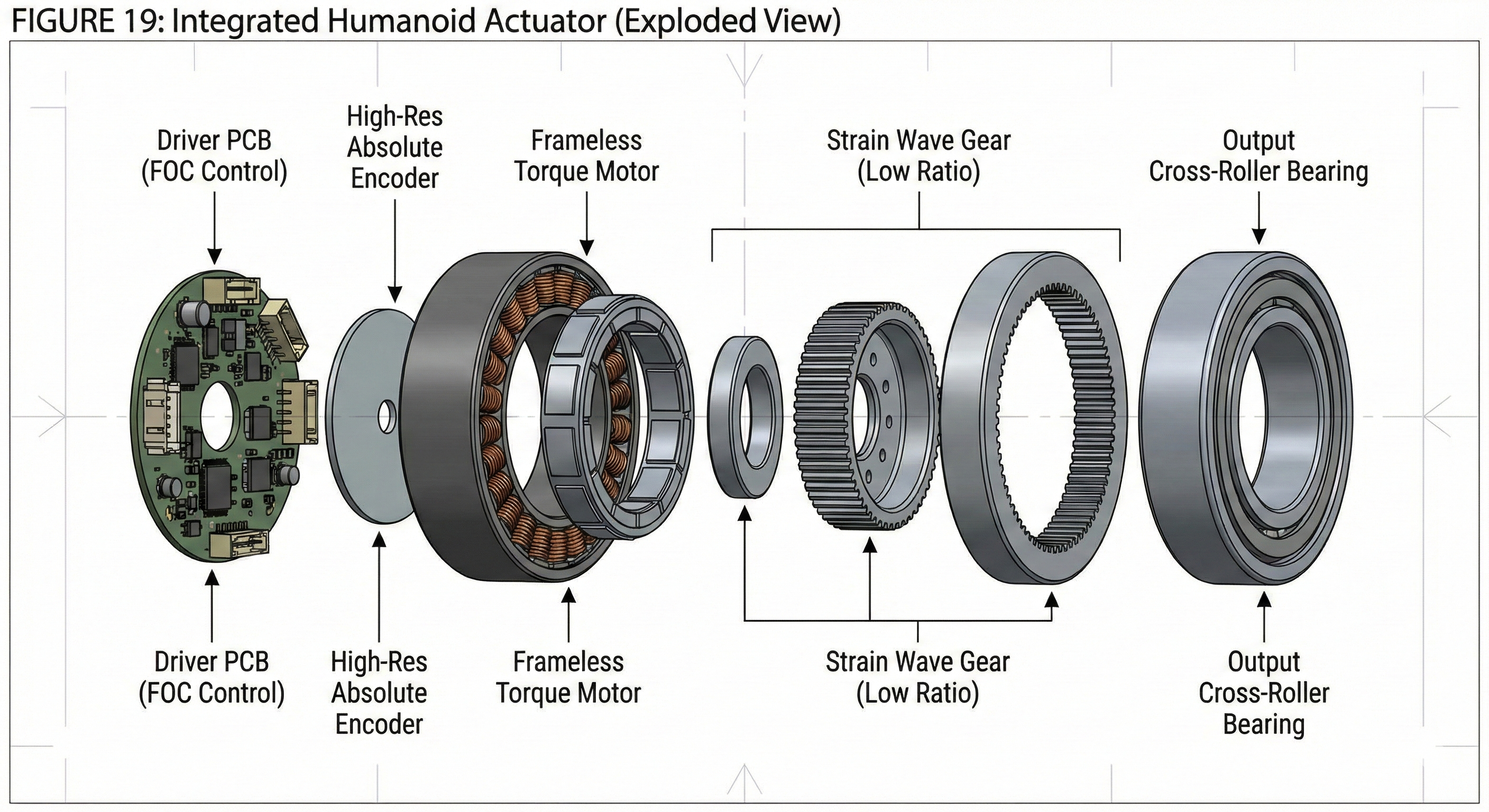
This technical article examines a critical hardware bottleneck in robotics: the gearbox. The authors argue that high-ratio gearboxes are a fundamental problem limiting robot dexterity, as they break sim-to-real transfer, destroy force transparency, and are prone to wear. The post explains the technical challenges and presents the authors' approach to addressing these issues through alternative mechanical designs.
Key quotes
· 4 pulledRobot dexterity is stuck behind many unsolved problems. This post focuses on one that we think is underappreciated: the gearbox.
High-ratio gearboxes break sim-to-real transfer, destroy force transparency, and are the first thing to wear out.
We explain why, and what we did about it.
You've probably seen the video: dozens of humanoid robots dancing in sync at the...
You might also wanna read

Humanoid Robot Actuators: Engineering Physics and Selection Guide for Bipedal Locomotion
A comprehensive engineering guide examining the physics and mechanical challenges of humanoid robot actuators. The article covers bipedal lo
 firgelli.com·27d ago
firgelli.com·27d ago
MIT researchers develop robotically assembled voxel building blocks for more sustainable construction
MIT researchers have developed robotically assembled building blocks called voxels that could make construction more efficient and sustainab
 robohub.org·1h ago
robohub.org·1h ago
Foundation Future Industries Wins $24M Pentagon Contract for Humanoid Military Robots
San Francisco startup Foundation Future Industries has secured $24 million in Pentagon research contracts to develop its "Phantom" humanoid
 hoodline.com·2h ago
hoodline.com·2h ago
Robot Talk Episode 154: Visual Navigation in Insects and Robots – Interview with Andrew Philippides
Claire interviews Andrew Philippides, a Professor of Biorobotics at the University of Sussex, about how insights from insect navigation (ant
robohub.org·2h ago
BMW to deploy humanoid robots in European car production for the first time
BMW is introducing humanoid robots from Hexagon Robotics for car manufacturing at its Leipzig factory in Europe, marking the first use of su
 bbc.com·9h ago
bbc.com·9h ago
Sea-urchin-inspired robot with 20 legs scales walls and navigates trees
A sea-urchin-inspired robot with 20 legs has been developed by scientists, offering a new design blueprint for more versatile robots capable
 livescience.com·13h ago
livescience.com·13h ago