Humanoid Robot Actuators: Engineering Physics and Selection Guide for Bipedal Locomotion
By
Robbie Dickson
Toasted golden, schmeared with insight. Top of the rack.
Summary
A comprehensive engineering guide examining the physics and mechanical challenges of humanoid robot actuators. The article covers bipedal locomotion dynamics, including the high-impact forces (2-3× body weight per step) that actuators must withstand over thousands of cycles. It provides a deep technical comparison of Quasi-Direct Drive (QDD) vs. Series Elastic Actuators (SEA), explains Reflected Inertia principles, and offers engineering guidance for actuator selection in humanoid robots. Written by Robbie Dickson, Chief Engineer at Firgelli Automations, the piece serves as a technical reference for robotics engineers working on bipedal systems.
Key quotes
· 3 pulledA humanoid robot takes roughly 5,000 steps per hour.
Each step sends a shock of 2–3× body weight through the leg actuators—forces that would be fine occasionally, but become destructive when repeated thousands of times without pause.
This relentless duty cycle is why most actuators fail in humanoids, and why the survivors all converged on the same engineering solutions.
You might also wanna read


Seattle high school robotics team heads to international underwater robotics championship in Canada
A team of seven Seattle high school students (Triton Robotics) from Seattle Academy will compete in the MATE ROV World Championships in St.
 geekwire.com·4d ago
geekwire.com·4d ago
Kalman Filter Tutorial: Understanding State Estimation Algorithms
This article provides an educational tutorial on the Kalman Filter algorithm, explaining its purpose for estimating and predicting system st
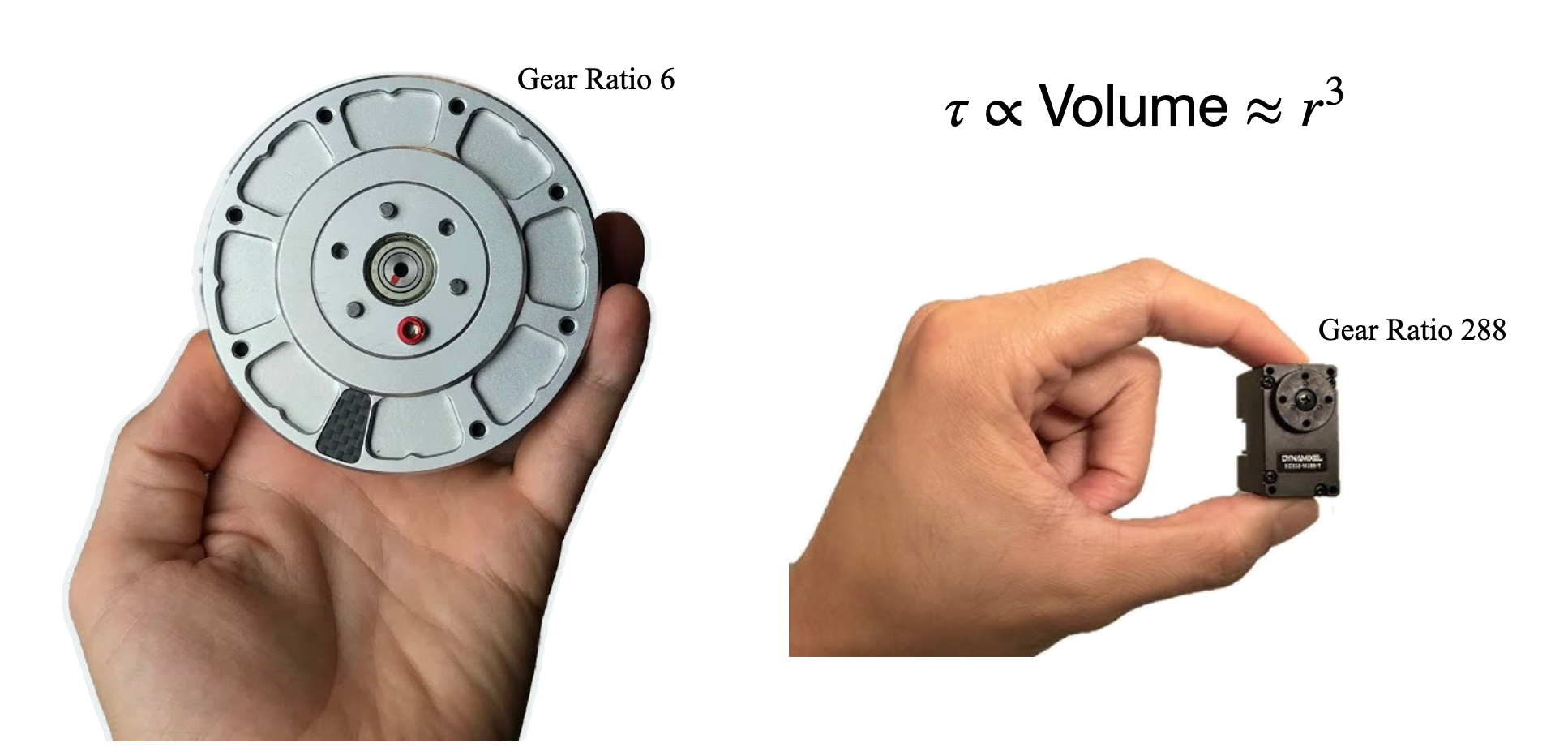
The Gearbox Problem: How Mechanical Design Limits Robot Dexterity
This technical article examines a critical hardware bottleneck in robotics: the gearbox. The authors argue that high-ratio gearboxes are a f

DIY Tunnel Construction: Engineering Challenges and Safety Considerations for Homemade Underground Projects
This article explores the growing trend of DIY tunnel construction, examining the engineering challenges, safety considerations, and practic
 practical.engineering·3mo ago
practical.engineering·3mo ago
Interactive Animated Engine Visualizations Website
A website homepage featuring animated visualizations of various engine types, allowing users to click on different engines to see how they w
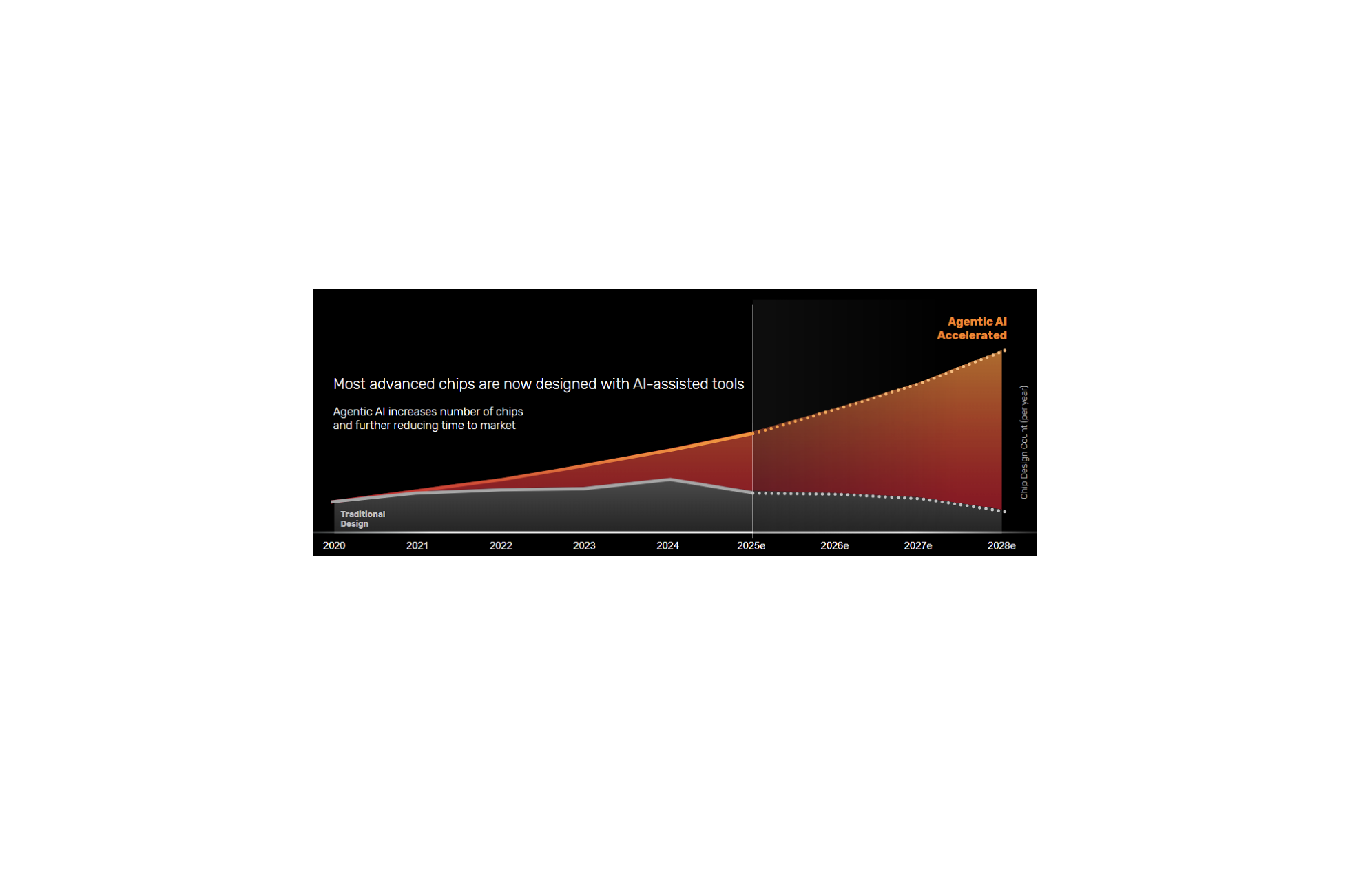
AI's Transformative Impact on Engineering Careers: Automation Creates New Entry Paths
The article examines how AI is transforming engineering jobs, particularly in chip design. While AI will automate many repetitive entry-leve